
Multiboot是指多镜像启动,比如在FPGA的加载flash里面存放2个或者多个FPGA的配置文件,每个配置文件都可以单独完成FPGA的逻辑配置
KR260 DPU配置教程1
作者:Chen Shaoyi,AMD工程师;来源:AMD开发者社区
官网上没有提供KR260的DPU预配置工程。在这篇博客中,我们将为 KR260 Vitis 加速平台创建硬件设计。 我们将从KR260预设文件开始,添加平台所需的外设并对其进行配置。 一切设置完毕后,我们将把硬件设计导出到XSA。
创建名为kr260_platform的Platform
Create Project > Next
Project name: kr260_platform > Next

勾选 "Project is an extensible Vitis platform" > Next

开发板选择Boards > KR260 > Next > Finish

如果没有安装KR260,需要先安装KR260

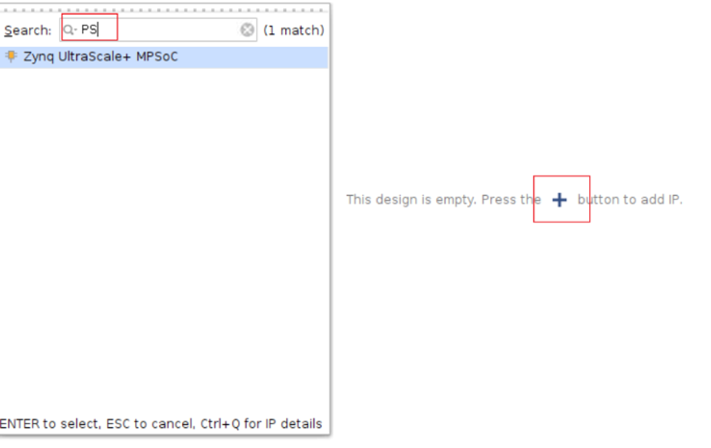
创建一个Block Design
Create Block Design > OK

Add PS > Run Block Automation > Apply Board Preset > OK
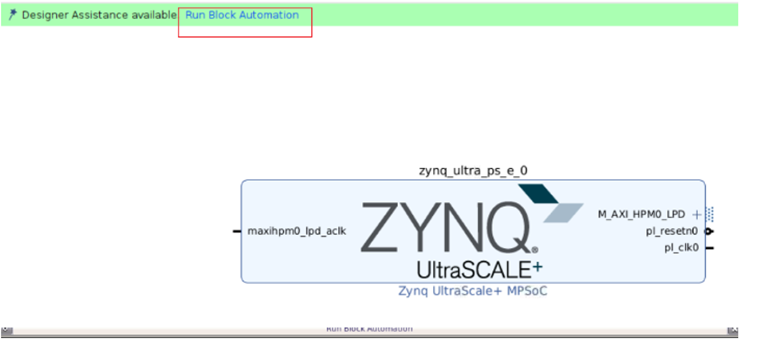

在此阶段,Vivado自动添加了 Zynq UltraScale+ MPSoC,并应用了 KR260 的所有板卡预设选项。 预设选项包括 MPSoC PS 模块配置和引脚分配。
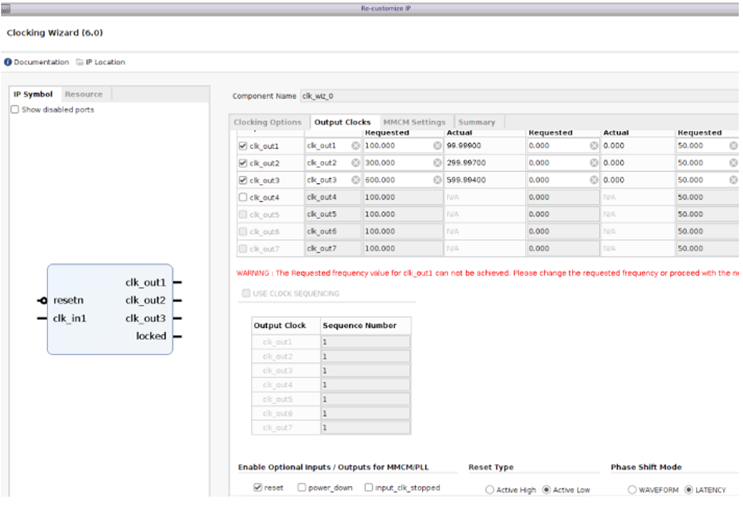
创建时钟和复位
Add a Clocking Wizard

使能Platform的AXI接口
使能PS的AXI Master接口
使能来自AXI Interconnect的AXI Master interfaces
使能来自PS的AXI Slave interfaces来允许kernels 连接 DDR 内存

导出XSA
点击 Validate Design 按钮来确认 block design 设计有效。在这个过程中Vivado会报告一个critical warning,这是因为 /axi_intc_0/intr 没有被连接。因为v++链接器会将中断连接到这个端口上,所以这个警告可以被忽略。
为 block design创建一个module wrapper
生成设计
导出 platform
. Name: kv260_hardware_platform
. Vendor: xilinx
. Board: kv260
. Version: 0.0
. Description: This platform provides high PS DDR bandwidth and three clocks.
参考链接:https://github.com/Xilinx/Vitis-Tutorials/tree/2022.2/Vitis_Platform_Cre...
KR260
DPU
配置教程
每日头条
最新文章
 Vitis AI 工具概述 |
 基于Zynq UltraScale+ MPSoC高性能EtherCAT主站方案 |
 AMD Xilinx MPSoC VCU 使用要点 |
 Multi-Scaler IP的linux示例以及debug(下) |
 如何在petalinux环境下使用python脚本实现opencv显示USB camera图像 |
 用最新视频AI 解决方案解决当今视频分析五大难题 |
关注FPGA开发圈微信公众号
精彩推荐
multiboot远程升级详解
AMD Xilinx PCIe Host 配置空间访问流程
AMD Xilinx的Versal器件中的PCIe IP,也可以作为PCIe Host。 AR76647 提供了相关驱动。
AMD Alveo MA35D 媒体加速卡 SDK 更新
我们很高兴地宣布 AMD AMA SDK 1.1.2 版本发布。该版本专注于支持 AMD Alveo™ MA35D 媒体加速卡的其他功能
基于CPM的QDMA数据传输参考设计
AMD QDMA子系统的PCI Express (PCIe)实现了高性能的DMA与PCI Express®3.x集成块,具有多个队列的概念
基于Versal的椭圆曲线数字签名验证的问题分析
目前在Versal上运行椭圆曲线数字签名验证的example 已经有了,请见如下源码
AMD MicroBlaze™ V 处理器-灵活高效的 RISC-V 处理器
AMD MicroBlaze™ V 处理器是一款面向 AMD 自适应 SoC 和 FPGA 的软核 RISC-V 处理器 IP。MicroBlaze V 处理器基于 32 位 RISC-V 指令集架构
如何检查或手动设置Xilinx 设计工具的环境变量?
在 Windows 操作系统中,环境变量可从项目导航 GUI 中进行设置或复原。
使用Caffe模型+DPU进行实时人脸检测:Vitis-AI 3.0的非官方支持流程
近年来,深度学习框架的快速发展使得人工智能应用领域取得了巨大的进步。其中,Caffe框架以其简单易用、高效快速的特点受到了广泛关注和应用。